
Publications
You can also find my articles on my Google Scholar profile.
Preprints

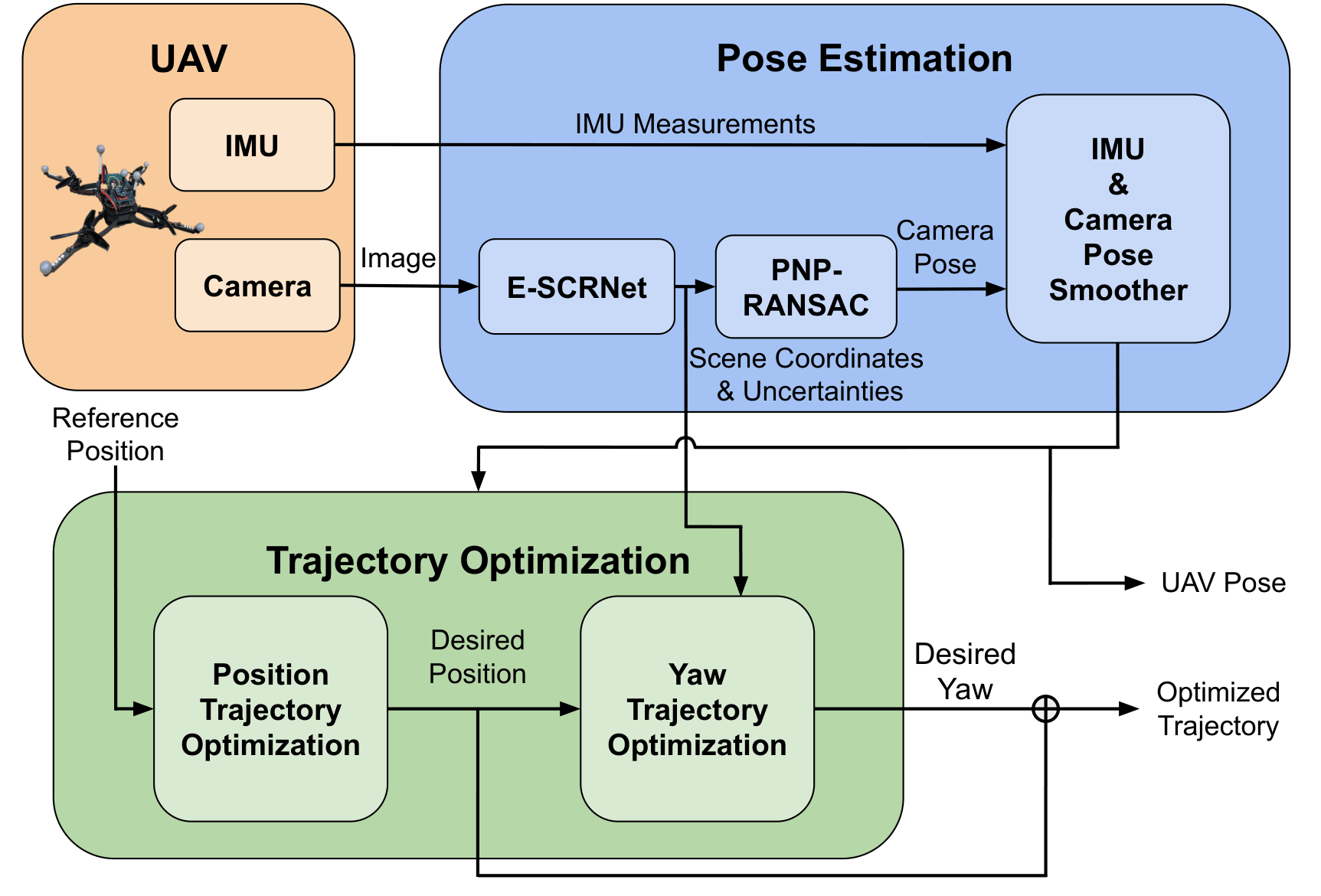
SCREP: Scene Coordinate Regression and Evidential Learning-based Perception-Aware Trajectory Generation
2025 (in review)
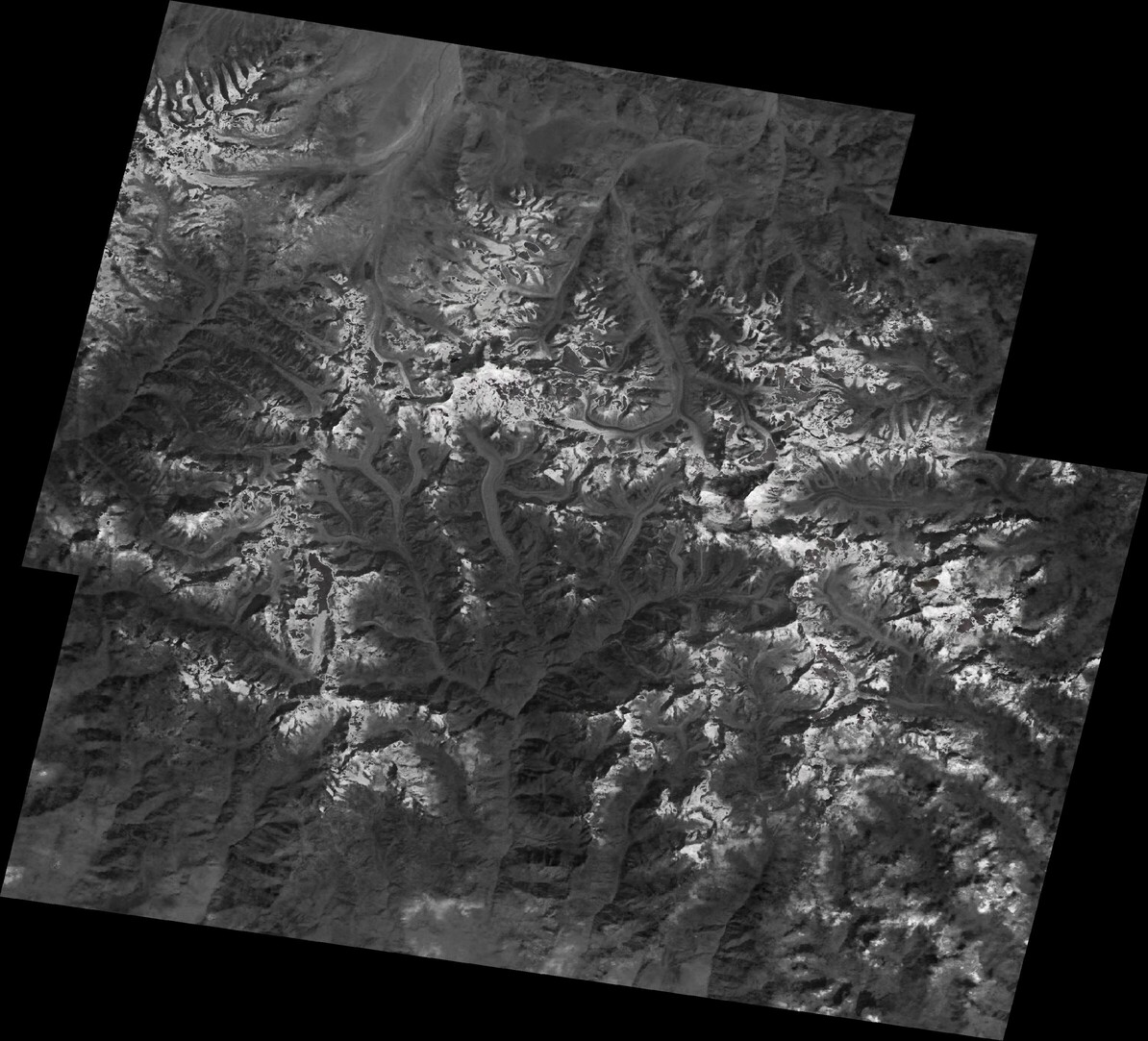
Construction of Digital Terrain Maps from Multi-view Satellite Imagery using Neural Volume Rendering
2025 (in review)
Publications
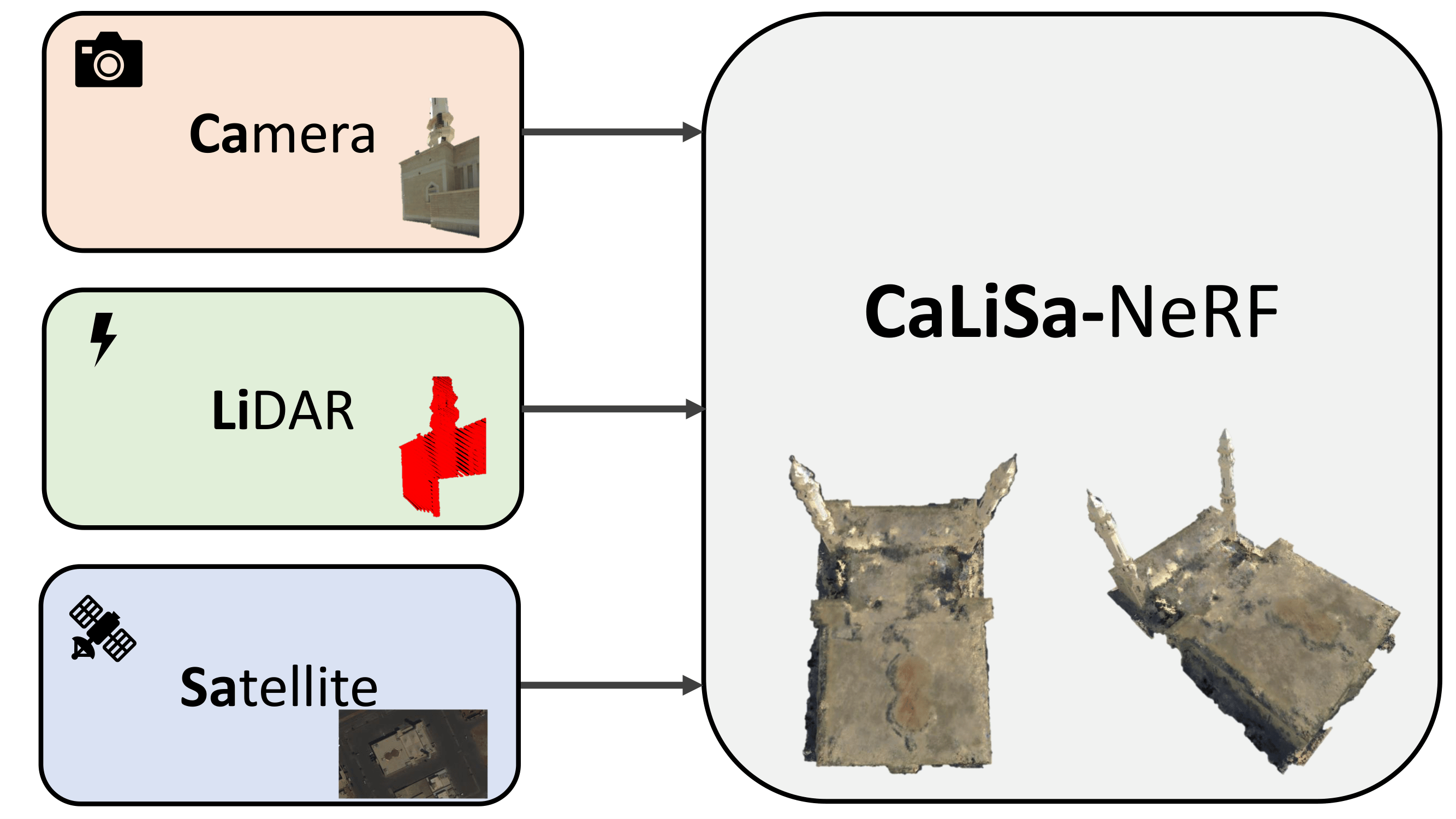
CaLiSa-NeRF: Neural Radiance Field with Pinhole Camera Images LiDAR point clouds and Satellite Imagery for Urban Scene Representation
WACV Workshop on Computer Vision for Geospatial Image Analysis (GeoCV), 2025
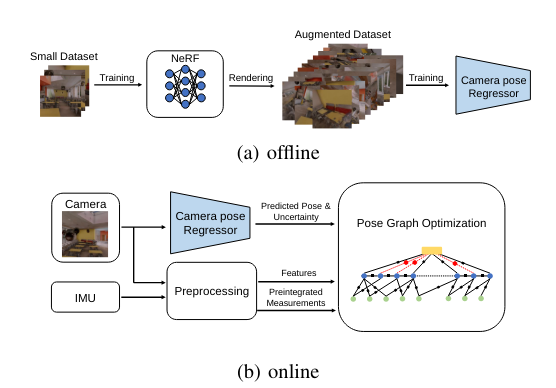
NVINS: Robust Visual Inertial Navigation Fused with NeRF-augmented Camera Pose Regressor and Uncertainty Quantification
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
Oral
Computing Forward Reachable Sets for Nonlinear Adaptive Multirotor Controllers
American Control Conference (ACC), 2023
Pseudospectral Method-based Safe Motion Planning for Quadrotors in a Cluttered Environment
AIAA SCITECH Forum, 2022